

Robotics for Climate Change
23 May 2022 · Room 108 B
Speaker 1: Matt Meister (on behalf of Britney Schmidt)
Title: Exploring Polar and Planetary Frontiers with Science-Driven Robotics
Abstract:
Beneath ice shelves on Earth, processes such as accretion, melt and circulation mediate the interaction
between the ocean and the ice. These are an important element of Earth’s climate system, contributing to the evolution of the cryosphere, and in some cases can destabilize ice shelves and ice sheets in our
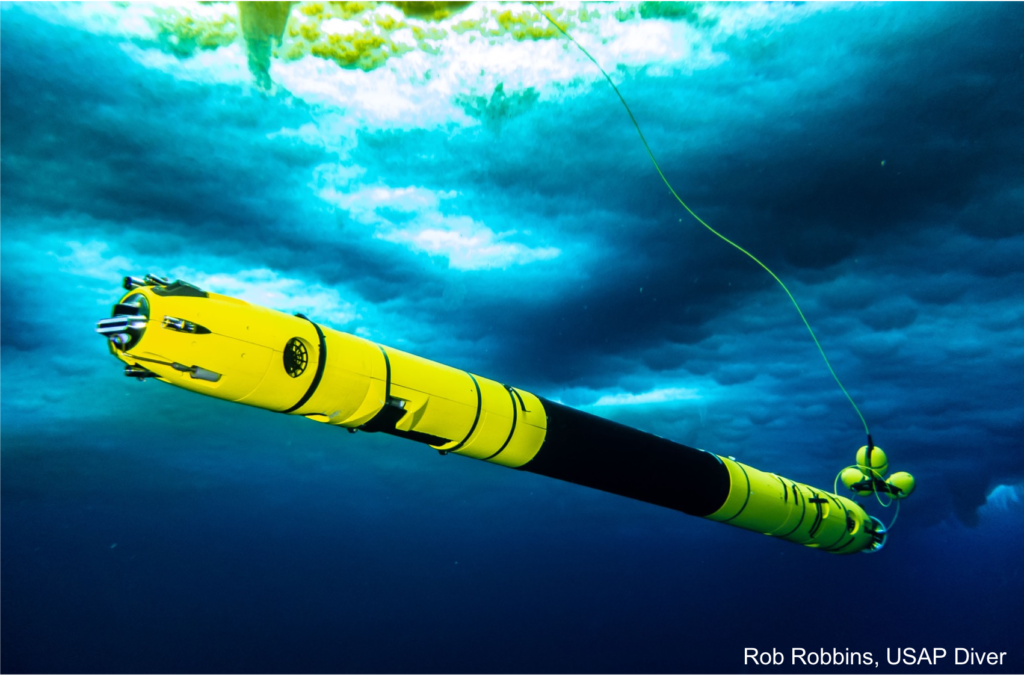
warming climate. And yet despite the critical role of these processes in a changing world, they are extremely challenging to observe given the harsh environment and thickness of the ice. Exploring the cryosphere can also form the foundation of our understanding of other ocean worlds, and provide a test bed for their exploration. To address the limitations in our observations, we developed an under ice robotic platform, Icefin, to explore beneath the ice and reach previously inaccessible regions that are critical to observe to understand these complex systems. By designing the robotic system iteratively with its science goals, Icefin has allowed us to make first of their kind observations of the climate system, constrain oceanographic conditions, geologic and glaciological context, and provide information on the ecosystems below the ice in ways not possible with less customized tools. In 2020, we used Icefin to reach the grounding line of a major glacier for the first time. In this presentation, I’ll describe some of the lessons we have learned in developing science-driven robotic platforms for Earth and planetary exploration. I will highlight our work on the McMurdo and Ross Ice Shelves as well as the Thwaites Glacier during the austral summers 2017- 2022, supported by NASA, NSF, NERC and Antarctica New Zealand. I will comment on the opportunity for robotic solutions to environmental science problems, and how to synergize across engineering and science disciplines to be more efficient and effective. Using new robotic capabilities, we are working to gather unique new data relevant to climate and planetary science, and develop techniques for exploring the Earth and one day Jupiter’s moon Europa, an ice-covered world not so unlike our own.
Speaker 2: Mandar Chitre
Title: Can low-cost robots help us understand ice-ocean interactions leading to global sea level rise?
Authors: Mandar Chitre, Grant Deane, Oskar Glowacki, Dale Stokes, Hari Vishnu, Hayden Johnson
Abstract:
Melting of tidewater glaciers and ice shelves are closely linked to sea level rise. Direct measurements of submarine melt rates of glacier ice are difficult to make, as the waters in front of the glacier terminus are hazardous, especially in summer when the ice is melting rapidly and subaerial and submarine calving events occur often. Over the past few years, we have sought to develop a method to estimate submarine melt rates by remotely measuring the sound that the melting glaciers produce. While the results are promising, we require some melt rate, acoustic and oceanographic measurements near the glacial terminus to calibrate our acoustic models. Given the hazardous environment that such measurements need to be made in, we turn to low-cost robots for help. In this talk, we outline the key challenges that the robots have to face (e.g. low-cost accurate localization, real-time data transfer, control system delays, vertical profiling, poor visibility, hazard of falling and surfacing ice blocks, operating in an ice melange and convectively-driven plumes, etc), and some of our current ideas on how to tackle them. Through this talk, we hope to excite others in the robotics community to work with us to develop technologies that may be helpful in making critically required measurements in hazardous glacial bays, and contribute to the understanding of ice-ocean interactions and long-term estimation of global sea level rise.
Speaker 3: Rahul Raj
Title: Human-Computer interaction for precision agriculture
Abstract: Farming in a small-scale, resource-poor farming system is majorly dependent on the traditional knowledge of farmers, with non-judicial, time-consuming and labour-intensive agricultural practices commonly implemented, leading to low productivity and degradation of resources. Scale-independent precision agricultural (PA) practices offer great opportunities for improvement in the present context of sustainability and climate variability. Using geographic information and communication technology (Geo-ICTs) principles, PA provides the opportunity for a farmer to apply the right input, in the right amount, at the right time, at the right location, and in the right manner. To collect timely, high-resolution data, ground-based, drone-based, airborne, and spaceborne image acquisition and interpretation techniques are required. These sensing mechanisms can identify stressed areas in real-time and, in many cases, asymptomatically – before the onset of visible stress, following corrective measures.
Speaker 4: Fabio Ramos
Title: Stein Particle Filter for Nonlinear, Non-Gaussian State Estimation
Abstract:
The sequential estimation of posterior distributions in state-space models from noisy observations is a critical capability in robotics, particularly in tasks such as localization, object pose estimation and terrain modelling. While sequential Monte Carlo techniques such as particle filters provide a solution for nonlinear dynamics and observation models, they do not scale well with the dimensionality of the problem. In this talk, I will introduce a new filtering technique that can leverage differentiability in both observation and dynamics models to produce nonparametric, non-Gaussian posteriors. As with particle filters, the posterior is represented by a set of particles but follow a different update rule based on Stein variational gradient descent that minimizes the Stein discrepancy. I will show that Stein Particle Filters scale better with the dimensionality of the data and can be implemented efficiently on GPUs. Finally, I will discuss other methods based on Stein variational gradient descent for control and motion planning.
Title: Actionable Dynamics Modeling for Drifter Prediction
Abstract:
Learning-based methods combined with easily-specified physics knowledge form a powerful duo to enable robust robotic performance in the open world. In this talk, I present a series of improvements in robotic perception and behavior learning centered around building high-quality models of the robot’s environment, its sensors, and even the robot itself. This presentation highlights several innovations in structured dynamics modeling focused on trajectory prediction of floating sensors in marine environments, both in simulation and real-world environments.
Speaker 6: Wilhelm Marais
Title: Design and Deployment of Marine Robotics for Environmental Exploration and Monitoring
Abstract:
The ocean plays a critical role in shaping the future of the planet under climate change, acting as the primary store of heat and carbon on Earth. In order to better understand the effects of this interaction between the climate and ocean into the future, exploration and monitoring of marine environments is critical. Subsea exploration is an archetypal example of an area where the use of autonomous and semi-autonomous robotics can reduce operational costs and personal risk, as well as enable the ability to access previously unexplored environments. Through the use of autonomous underwater vehicles, long term and repeat monitoring of underwater habitats and biodiversity becomes possible, leading to increased understanding and improved strategies to provide resilience to climate change. This workshop presentation looks at some of the recent developments in developing and deploying autonomous marine vehicles at the Australian Centre for Field Robotics. This includes development of imaging and sensing platforms, autonomous navigation and control algorithms, mapping and planning, and data analytics.
Speaker 7: Helga S. Huntlley
Title: Surface Signatures of Ocean Subduction for Targeted Sampling
Abstract:
Vertical velocities in the ocean is generally several orders of magnitude smaller than horizontal ones. However, the vertical exchange of water masses is a critical component of the climate system; it also plays a large role in the redistribution of nutrients and pollutants, thereby impacting ecosystems. It is therefore important to better understand the dynamics of the regions in the ocean where this vertical exchange takes place. Substantial vertical exchange tends to occur in narrow areas of the ocean, such as along density fronts. Thus, any field campaign to study vertical exchange must rely on targeted sampling. Here, we discuss one approach for revealing surface signatures of subducting regions through drifter deployments to aid in the proper placement of sampling assets.
This workshop is supported by the RAS Technical Committees on Multi-robot Systems, Marine Robotics, and Robotics Research for Practicality.
We graciously acknowledge support from Treeswift and IEEE TechEthics.