
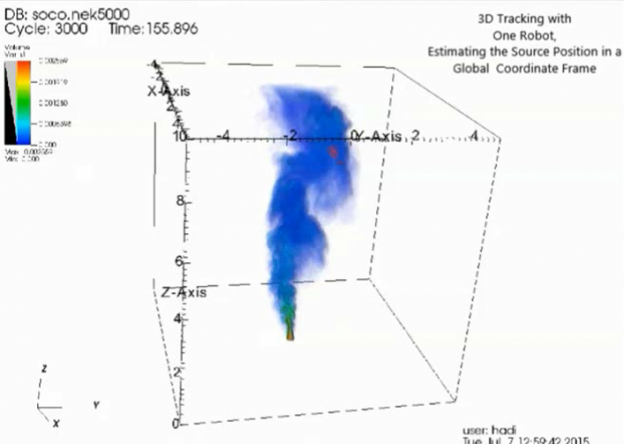
Variations in material concentration resulting from a biochemical or radiological contaminant leakage, such as an oil spill in the ocean or a radioactive dispersal in the atmosphere, is dominated by turbulent mixing. The result is a highly anisotropic and unsteady sensory landscape where sensor measurements become the sporadic and intermittent which renders gradient based search strategies highly ineffective. This work develops information based search strategies for autonomous robots to search and localize the source of a biochemical contaminant dispersed in turbulent media. The approach has been validated using state-of-the-art 3D computational fluid models of the 2010 Deep Water Horizon oil spill developed by Dr. Alex Fabregat Tomás at CUNY.
Grant: CARTHE-II